We have been victorious! Unfortunately, not out on track though... But we have managed to win the data integration & transformation battle between the GPS data, the Leanometer data and the TrackVision data overlay software.
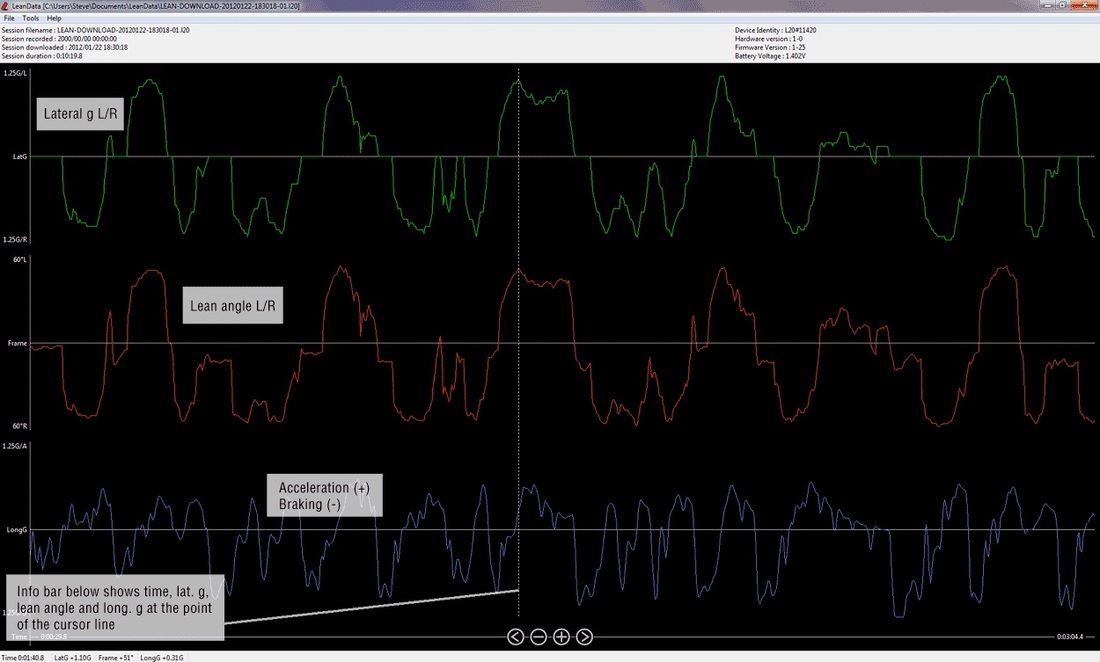
After downloading the captured Leanometer data, the data needed to be doubled in frequency from 5Hz to 10Hz. Then, the lean angle figures needed to be transposed (as the Leanometer captures right-handed corners as negative figures - the opposite way for optimum display on a 'sweep gauge'), before being mapped against captured GPS data that has little in the way of recognisable reference points.
From thereon, all that was required was to load the combined data through a new TrackVision interface file and to create a new data overlay dashboard - complete with a semi-transparent leaning motorcycle!
Below is the onboard video from last weekend's Race 4 (Mini Sound of Thunder Race 2 from Round 4). The rest of the Round 4 onboard videos are now also available on the YouTube channel.
Enjoy! :-)
After downloading the captured Leanometer data, the data needed to be doubled in frequency from 5Hz to 10Hz. Then, the lean angle figures needed to be transposed (as the Leanometer captures right-handed corners as negative figures - the opposite way for optimum display on a 'sweep gauge'), before being mapped against captured GPS data that has little in the way of recognisable reference points.
From thereon, all that was required was to load the combined data through a new TrackVision interface file and to create a new data overlay dashboard - complete with a semi-transparent leaning motorcycle!
Below is the onboard video from last weekend's Race 4 (Mini Sound of Thunder Race 2 from Round 4). The rest of the Round 4 onboard videos are now also available on the YouTube channel.
Enjoy! :-)




 RSS Feed
RSS Feed